欧拉角与旋转矩阵的相互转换,是图形计算中的常见问题。
2.1. 欧拉角的理解
表达旋转变换最简单的理解是三种旋转矩阵(绕X轴旋转矩阵,绕Y轴旋转矩阵以及绕Z轴旋转矩阵)级联。而欧拉角同样也有三种:航向角heading,俯仰角pitch和滚转角roll;其中,航向角heading有时也被称为偏航角yaw。三个欧拉角定义的矩阵级联也可以定义成旋转矩阵,这种旋转变换也叫做欧拉变换。
两者并没有绝对的对应的关系,但是绝大部分情况下,我们可以确定一个默认的视图方向:朝向负z轴,头部沿y轴定向,如下图所示: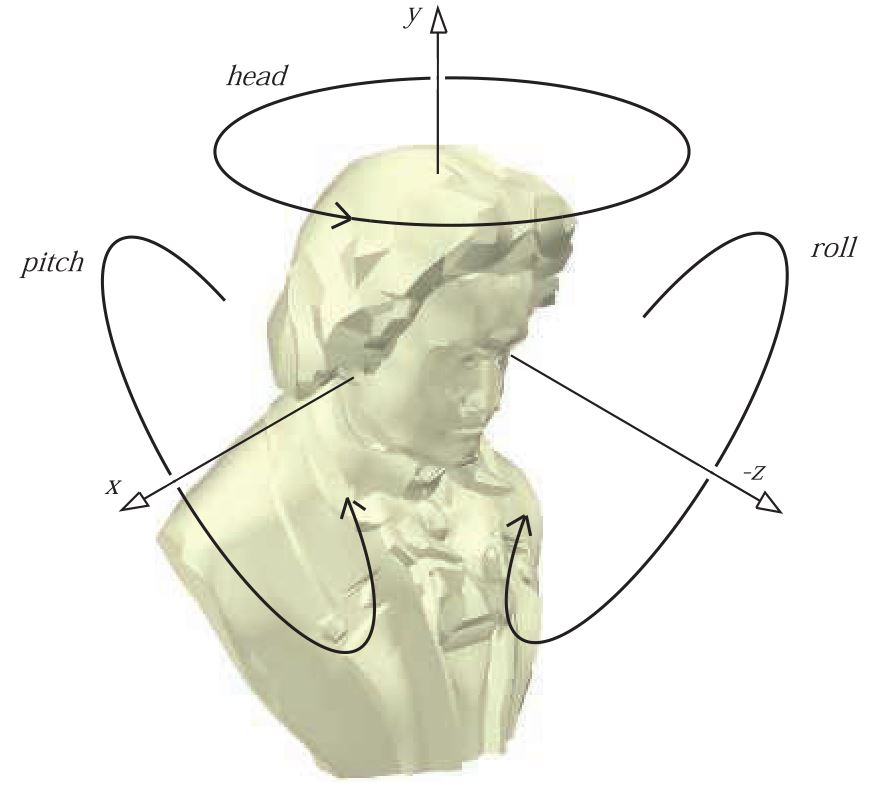
想象一个飞机也位于上图的坐标系的默认视图,那么很显然可以看出一个对应关系:
- 航向角heading为绕Y轴旋转
- 俯仰角pitch为绕X轴旋转
- 滚转角roll为绕Z轴旋转
2.2. 欧拉角转旋转矩阵
如上节所述,确定欧拉角到底是绕哪一个轴旋转的关键是确定默认的视图方向。另一个需要确定的因素就是旋转的顺序。由于矩阵的乘法不满足交换律,那么矩阵级联的顺序不同,得到的旋转矩阵也不同。一种比较常用的旋转顺序是:
\[{\textbf{E}}(h,p,r) = {\textbf{R}}_z(r){\textbf{R}}_x (p){\textbf{R}}_y(h)
\]
\]
我们使用GLM(OpenGL Mathematics)库进行验证一下:
#include <iostream> #include <glm/gtx/euler_angles.hpp> using namespace std; static void PrintMat(const glm::mat4& m) { for (int i = 0; i < 4; i++) { for (int j = 0; j < 4; j++) { printf("%.9lf\t", m[i][j]); } printf("\n"); } } int main() { glm::mat4 rotY = glm::eulerAngleY(glm::radians(24.0f)); glm::mat4 rotX = glm::eulerAngleX(glm::radians(65.0f)); glm::mat4 rotZ = glm::eulerAngleZ(glm::radians(42.0f)); glm::mat4 rotYXZ = rotY * rotX * rotZ; PrintMat(rotYXZ); cout << endl; glm::mat4 rotYXZ1 = glm::eulerAngleYXZ(glm::radians(24.0f), glm::radians(65.0f), glm::radians(42.0f)); PrintMat(rotYXZ1); cout << endl; glm::mat4 rotYXZ2 = glm::yawPitchRoll(glm::radians(24.0f), glm::radians(65.0f), glm::radians(42.0f)); PrintMat(rotYXZ2); }运行结果如下:
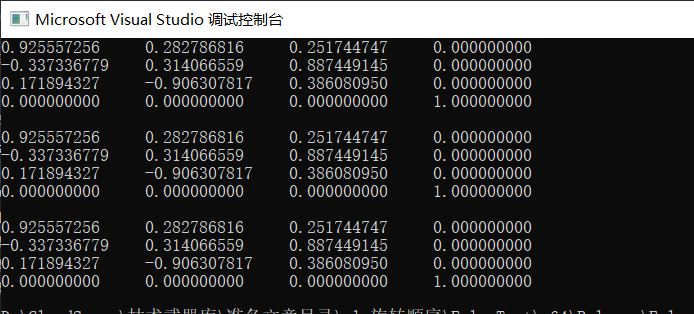
直接使用欧拉角旋转矩阵相乘,与eulerAngleYXZ()函数,以及yawPitchRoll()函数三者的矩阵结果是一致的。说明在GLM中欧拉角的定义以及旋转顺序,与本文论述的一致。
2.3. 旋转矩阵转欧拉角
已知绕X轴、Y轴以及Z轴旋转矩阵的公式以及它们的旋转顺序,可以很容易倒推旋转矩阵表达的欧拉角。当然也没有那么容易,因为有一些特殊情况必须处理。那么还是通过GLM进行实现:
#include <iostream> #include <glm/gtx/euler_angles.hpp> using namespace std; static void PrintMat(const glm::mat4& m) { for (int i = 0; i < 4; i++) { for (int j = 0; j < 4; j++) { printf("%.9lf\t", m[i][j]); } printf("\n"); } } int main() { glm::mat4 rotY = glm::eulerAngleY(glm::radians(24.0f)); glm::mat4 rotX = glm::eulerAngleX(glm::radians(65.0f)); glm::mat4 rotZ = glm::eulerAngleZ(glm::radians(42.0f)); glm::mat4 rotYXZ1 = glm::eulerAngleYXZ(glm::radians(24.0f), glm::radians(65.0f), glm::radians(42.0f)); PrintMat(rotYXZ1); cout << endl; float y = 0, x = 0, z = 0; glm::extractEulerAngleYXZ(rotYXZ1, y, x, z); cout << glm::degrees(y) << '\t' << glm::degrees(x) << '\t' << glm::degrees(z); }运行结果如下: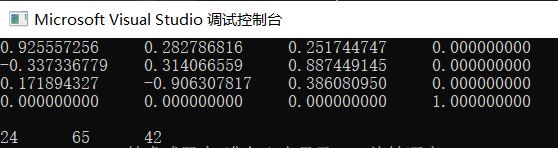
由欧拉角参数生成的eulerAngleYXZ()与extractEulerAngleYXZ()提取的欧拉角一致。说明GLM的实现是正确的,一般的图形矩阵计算库应该都有类似的接口。
热门文章
- 2月10日|Shadowrocket/Clash/V2ray/SSR每天更新19.7M/S免费节点订阅链接地址分享
- 1月7日|V2ray/Shadowrocket/SSR/Clash每天更新19.4M/S免费节点订阅链接地址分享
- 2月23日|Shadowrocket/SSR/V2ray/Clash每天更新19.2M/S免费节点订阅链接地址分享
- 中国宠物食品排名(中国宠物食品排名榜)
- synchronized有几种用法?
- 1月25日|Shadowrocket/Clash/SSR/V2ray每天更新21.7M/S免费节点订阅链接地址分享
- react项目配置postcss-px2rem-exclude
- 猫疫苗三针多久打完有效(猫三针疫苗间隔多久)
- 1月19日|Shadowrocket/Clash/SSR/V2ray每天更新19.8M/S免费节点订阅链接地址分享
- 1月17日|Clash/V2ray/Shadowrocket/SSR每天更新21.3M/S免费节点订阅链接地址分享